Are you interested in accurate positioning? Then an RTK setup is the way to go. This article will discuss a typical RTK setup without going in too much details.
First things first:
Let’s get some definitions right:
GNSS means Global Navigation Satellite System, there are many GNSS constellation in the world, for example:
GPS (Global Positioning System) also used a lot as a generic term, but in fact is US based. GALILEO is European and GLONASS is Russian.
Typically GNSS has an accuracy of 2.5m to 1.5m. For many applications this is sufficient. We use it daily in our cars and phones for example to navigate the city.
For some applications, such as mapping and surveying or farming, higher accuracy is required. That is where RTK comes in!
RTK is a technology which uses correction messages to compensate for atmospheric distortions. This allows RTK to be cm-level accurate
What is RTK used for?
The applications are limitless. Many typical applications are live applications such as robotics, autonomous vehicles and autonomous driving. Alternatively, it can also be used for surveys to get accurate data on the location of certain features.
How does a typical RTK setup work?
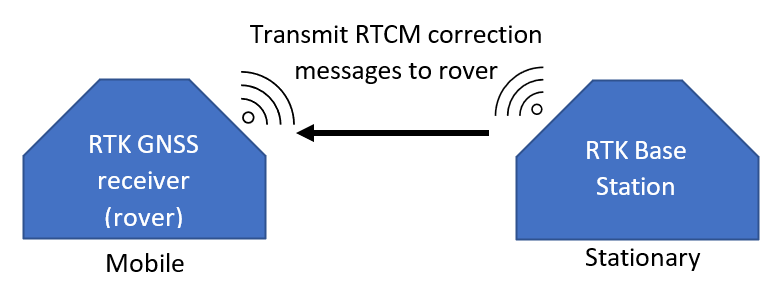
A typical RTK setup consists of the following 3 components:
– a rover – The rover is the device which is used to capture the positions of interest.
– an RTK base station – The base station is a stationary GNSS receiver, which is used to provide correction messages.
– a data link – the data link is used to transfer the correction messages from the base station to the rover. These correction messages are typically ‘RTCM’ messages.
The rover and base station can be anything from a DIY setup using relative cheap modules such as https://www.sparkfun.com/products/15136 to professional RTK systems costing north of 10k USD/EUR.
The data link to transmit correction data can be a bluetooth link, a wifi link, a data cable or anything in between or beyond.
What is an NTRIP provider?
If you can’t or don’t want to use your own RTK base station you can also use an NTRIP provider. An NTRIP provider provides RTCM correction messages via the internet on a subscription basis (free or paid). In this case only an internet connection is required. This can be via a SIM-card using 4G or LTE networks. The NTRIP provider has an IP address and port, combined with a username and password to receive the correction messages. These correction messages can then be provided to the an NTRIP modem on the rover to directly enable the cm-level accuracy.
An easy method of getting NTRIP correction messages to a rover is via an NTRIP modem, or by using an off the shelf setup.